
Home
About
Team
Documentation
GitHub
Home
About
Team
Documentation
GitHub
Home
About
Team
Documentation
GitHub
Home
About
Team
Documentation
GitHub
Repeat Rover is a remote-programmable automated R/C vehicle designed for resource delivery in repeated process environments.
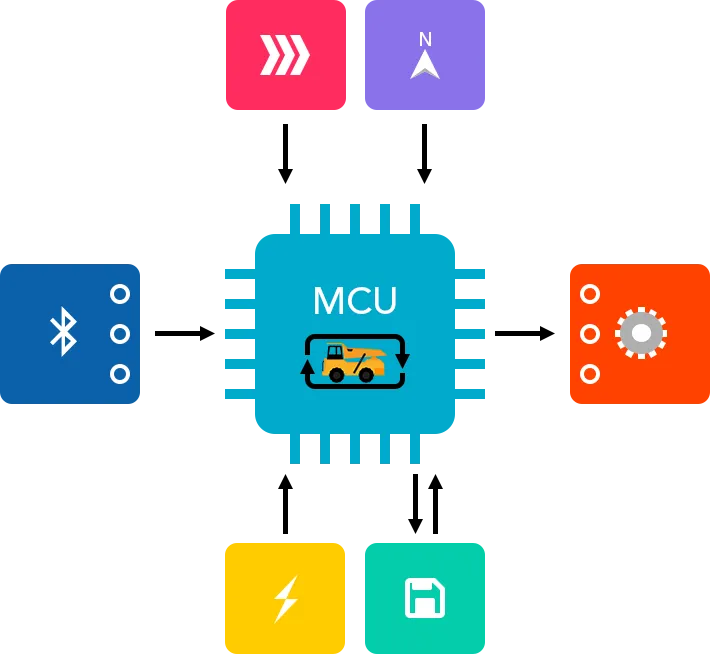
Click on a component of the graphic above to learn more about the project.
Repeat Rover is an automated domestic item delivery system which can remember a user driven path. This will be useful when paired with an automatic item reloader at its home dock that loads items to be delivered onto the car, and a remote device which signals to the car when it is being called. Upon first setup, the user will drive the rover using a bluetooth transceiver app on a phone transferring the desired path using bluetooth while the microcontrollers record the speed and direction of the rover using wheel mounted hall effect sensors and onboard magnetometers respectively. With this data stored in the onboard SD card, the rover will be able to deliver things from its home dock to the end of the user generated path. When called by the user's remote summoning device, the microcontroller on Repeat Rover will start up and translate the stored data into movement of the wheels and steering direction. Once delivery is complete, the rover will turn around 180 degrees and do the inverse of the actions it just completed to accurately return back to its loading station. The Repeat Rover would be reset with user need in order to change the desired path.